美國大學研究人員和STEM學生正在為DOE的核工業項目體開發機器人系統。
1、環境修復工作

美國能源部(DOE)環境管理辦公室(EM)的任務是解決冷戰50年期間核武器生產和政府資助的核能研究項目造成的環境遺留問題。
這一“遺產”包括世界上最危險的放射性區域,其中有大量放射性廢物、核廢料、多余的钚和鈾、數千個受污染的核設施,以及受污染的土壤和地下水。
EM成立于1989年,負責應對冷戰遺留問題的清理和剩余核材料的管理。
作為世界上最大的環境清理項目,EM已負責清理美國全國107個地點,其總面積相當于美國羅德島州和特拉華州的總和。
EM在核廢料清理的幾乎每個領域都取得了實質性進展,并已完成其中91個地點的清理。
自1995年以來,佛羅里達國際大學(FIU)應用研究中心通過在高放廢物管理領域進行應用研究,為EM任務做出了貢獻;停用和退役;土壤和地下水;機器人技術;信息技術;以及科學、技術、工程和數學(STEM)教育和培訓。
以下是FIU為支持EM環境修復工作而開發的各種機器人。
2、外部管道爬行機器人
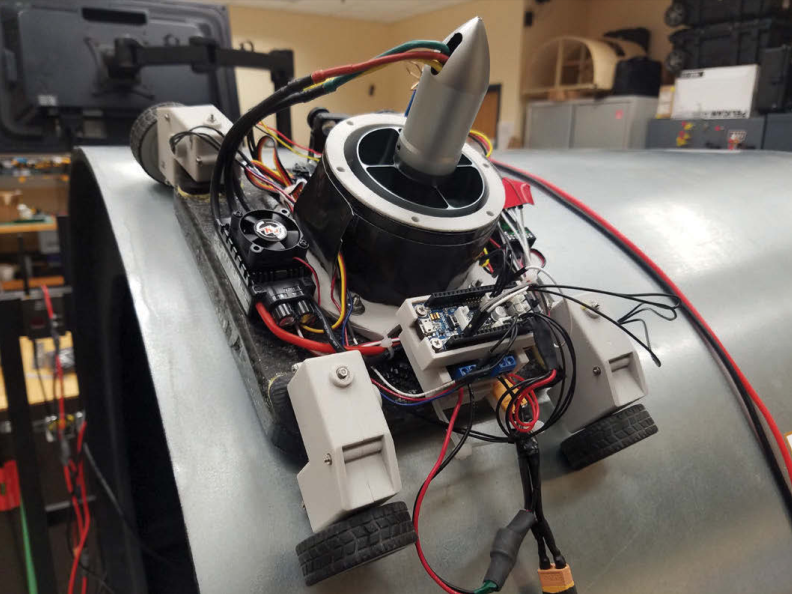
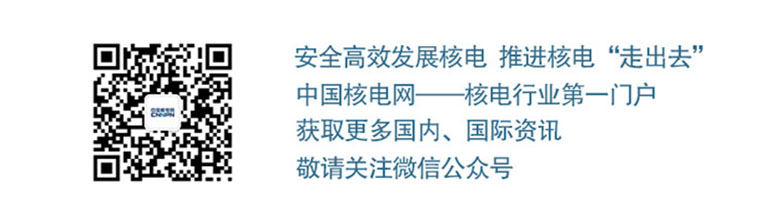
圖1:外部管道爬行機器人臺架試驗
FIU正在開發一種爬行機器人,可以幫助評估薩凡納河(Savannah River)現場H Canyon排氣隧道的結構完整性。
60多年來,由于隧道排出的放射性和酸性煙霧,隧道的混凝土墻已經損毀。
這項研究是與美國佛羅里達大學和德克薩斯大學奧斯汀分校聯合進行,這兩所大學通過DOE的核能大學項目平臺開發機器人,該機器人平臺將開發和部署爬行機器人,并提供檢查隧道的手段。
爬行利用電子管道風扇產生動力,使系統能夠在排氣通道內3英尺直徑的鋁管道整個圓周上導航爬行,移動平臺由我們的合作者開發。
爬行履帶的底盤設計與管道的幾何形狀相匹配,以便在履帶底盤的下側和管道表面之間保持一致的分離距離(圖1)。
管道是圓柱形的,履帶設計為在四個車輪的每個車輪上使用2-DOF(自由度)電機安裝裝置。
可以讓履帶橫向移動,然后徑向移動,或者反之亦然,移動到管道表面上的任何點,直到到達所需位置。
履帶可以配備一套傳感器,以幫助表征隧道內的條件,包括輻射、熱和濕度傳感器。
利用車載攝像頭,工程師將能夠直觀地評估管道后面墻壁的損壞情況。
履帶的最終原型將能夠執行半自主或自主任務,目標是成為一個多功能系統,可用于幫助隧道的結構評估,并提供隧道內條件的信息。
3、內部管道爬行機器人

圖片圖2:3英寸和4英寸內部爬行機器人
FIU還為DOE開發多個內部管道爬行機器,用于管道和基礎設施的檢查(圖2)。
已經開發了許多用于工業中各種應用的管道爬行機器人,但很少有人專注于小直徑管道。
FIU的第一臺管道爬行機器人由EM資助,設計用于穿過直徑3英寸和4英寸、長度可達150英尺的管道,并在多個45°和90°的角度中導航。導航通過漢福德的雙殼罐空氣供應線,以提供有關油箱內完整性的信息。
爬行機器人由兩個夾持管壁的夾具和兩個可伸縮的伸縮器組成。
這四個模塊使用氣動制動器,并依次啟動以提供向前和向后的運動。
該單元包括位于單元前部的用于實時視頻反饋的攝像頭、為制動器提供空氣的系繩以及攝像頭的電源和數據線。
由于該系統是模塊化的,因此可以根據需要添加額外的夾具或延長器。
FIU也在發展傳感器模塊,可以集成到系統中,并可以提供一套傳感器,包括光探測和測距(LiDAR)系統、超聲波傳感器和環境傳感器。
爬行機器人的結構非常簡單,成本效益高,使用了3D打印部件和商用現成的制動器、攝像頭和傳感器。

圖3:6英寸內管道爬行機器人原型機
除了3英寸和4英寸管道爬行機器人外,FIU正在開發一種6英寸,其工作方式與其正在開發中的姊妹爬行機器人類似,以穿過6英寸排水管(圖3)。
漢福德雙殼罐的排水管與二次襯里下方的排水槽相匹配,并為檢查二次襯里提供了一條途徑。
6英寸版本的預期目的是用90°彎頭在大約50英尺的管道中導航,并部署一個兒童漫游車——一個安裝在較大漫游車上的較小機器人設備,可以穿過排水槽,并提供有關二次襯完整性的信息。
與較小的爬行機器人不同,這個版本預計在管道內的結垢、水和泥漿檢查方面會有重要意義。
對最終設計進行了修改,以解決這些約束條件,其中引導件將有助于移動經過縮放和氣動制動器,氣動制動器垂直于夾持器,以最大化夾持力。
圖3顯示了初始設計原型和更堅固的原型,具有更堅固的框架和更強的拉力。該系統還可以增加傳感器模塊,以提供關于管道內部的附加信息。

圖4:2英寸爬行機器人原型機
FIU還在開發一種履帶式設備,該設備可在2英寸直徑的管道中導航(圖4),由DOE國家能源技術實驗室資助,旨在檢查化石能源發電廠的過熱器線路。
由于管道直徑較小的限制,氣動執行機構是不可能的,因此采用了螺母/導螺桿設計。
此外,過熱器管線具有180°彎曲,彎曲半徑不同。這需要一個明顯更小的模塊幾何形狀,電機只能提供較大履帶產生的拉力的一小部分。預計該裝置將需要與多個履帶相連,以穿過過熱器管線的整個長度。
與其他爬行機器人類似,框架由3D打印材料制成,系統組件可在市場上買到。
該系統還將具有額外的模塊,這些模塊將容納小型超聲波傳感器,這些傳感器提供有關管道完整性的信息。
4、微型漫游車

圖5:微型漫游車的初始原型
FIU一直在開發一種微型漫游車,用于在漢福德的雙殼罐主內襯下方的耐火材料槽中導航。
槽分配空氣以冷卻儲罐的主襯里,并提供了獲得儲罐具體情況信息的最佳方法。
對于漢福德的大多數罐來說,槽寬約1英寸,結構像從罐中心伸出的樹枝。
油箱內襯由碳鋼制成,可以使用磁鐵將漫游車粘附在油箱內襯的下側。
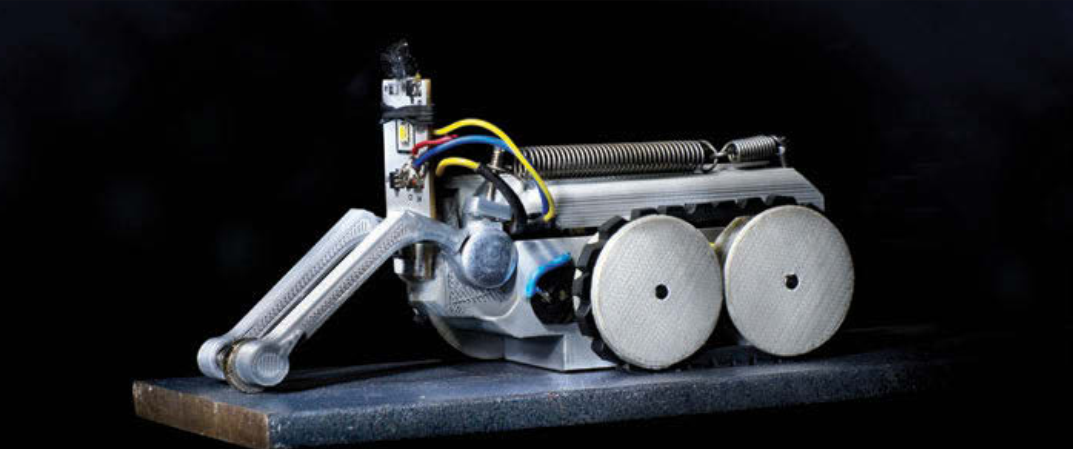
圖5:微型漫游車的最終原型
漫游車(圖5)可以通過儲罐的環形空間部署,并可以從環形空間進入任何耐火材料槽。
然后,它需要行駛大約35英尺才能到達油箱的中心。漫游車由四個獨立驅動的輪子提供動力,包括一個攝像頭和一個磁性機械臂,使該裝置能夠在焊縫上導航。
在不久的將來,一個額外的模塊,包括一個超聲波傳感器,將連接到漫游車的后部,該傳感器能夠測量內襯的厚度并識別關注區域
5、外骨骼

圖6:用于人體測試的肌電圖傳感器,放置在手上
開發機器人操縱器/手和操作員輔助設備(如可穿戴機器人設備(外骨骼和傳感器)),可以最大限度地減少工人疲勞和員工傷害。
外骨骼可最大限度地減少操作員的肌肉疲勞和受傷,而機器人操作器可用于自動化重復和預定義的常規任務。
FIU與佛羅里達大西洋大學和愛達荷國家實驗室合作,計劃開展一個由EM資助的機器人研究項目。
該項目的目標是量化手套箱操作期間的人體疲勞操作,并評估用于這些任務的靈巧機器人機械手的可行性。
研究包括調查各種手套箱任務,在執行任務時使用肌電圖傳感器檢測人體肌肉疲勞,定制機械手和手臂組合以執行相同任務,以及兩種測試方法之間性能比較的統計分析:使用人類執行任務和使用機械臂/手執行相同的任務。
此外,在該項目的第二階段,FIU團隊擴大了研究范圍,包括開發一種新型設計以及外骨骼機構的原型設計和測試。
作為第一步,FIU團隊專注于開發高精度肌電圖設備,這是業界首個經過Wi-Fi認證的內置Wi-Fi連接的單片微控制器。
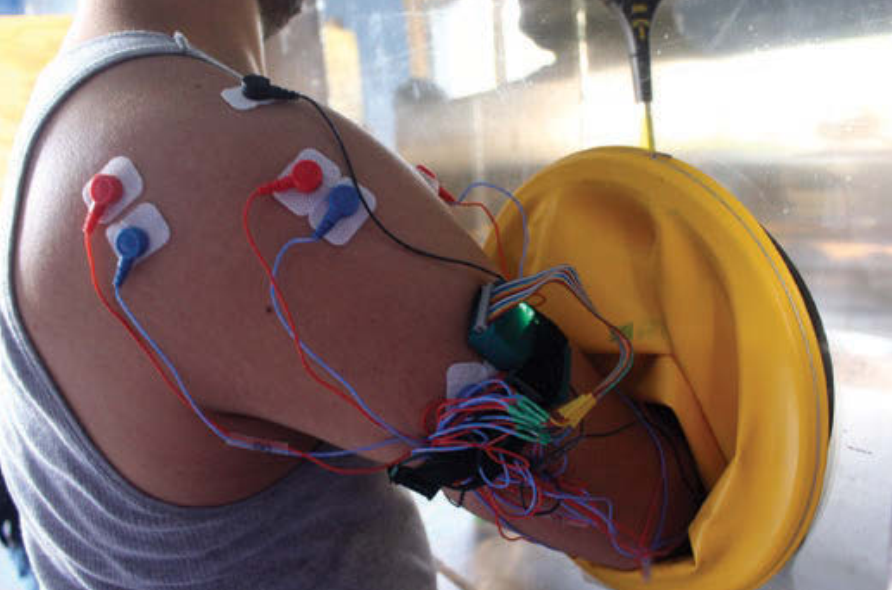
圖6:用于人體測試的肌電圖傳感器,放置在手臂上
該傳感器的目的是量化手套箱操作過程中的人體疲勞。傳感器(圖6)用于人體測試和數據采集。
傳感器的優點包括其低姿態的特性和傳感器的放置范圍,這使得設備能夠準確地記錄,同時使手和手臂不受阻礙,并具有充分的靈活性。
為了使用肌電圖設備量化人體疲勞,人體受試者獲得了機構審查委員會的批準。
實驗期間使用了i-Limb量子機械手。
這只手帶有一個用戶控制的界面,有兩個輸入來打開和關閉手。
一個名為BioSim的應用程序可以用于在所選擇的抓握類型之間切換,如手指敲擊、強力抓握、橫向卡夾或拇指和食指之間的精確抓握。
為了使用為該項目設計的控制器操作手,選擇了Teensy 3.6微控制器。
該微控制器能夠輸出兩個模擬信號用于手動控制,這兩個信號由操作員通過操縱桿指定,以打開和關閉手。
此外,UR5機械臂被編程為在用戶控制機械手的同時自主運行。這允許預先編程的路徑,這些路徑獨立于對手臂的控制來處理挖砂和刷磚任務。
手臂和手初始化后,將手插入手套中。
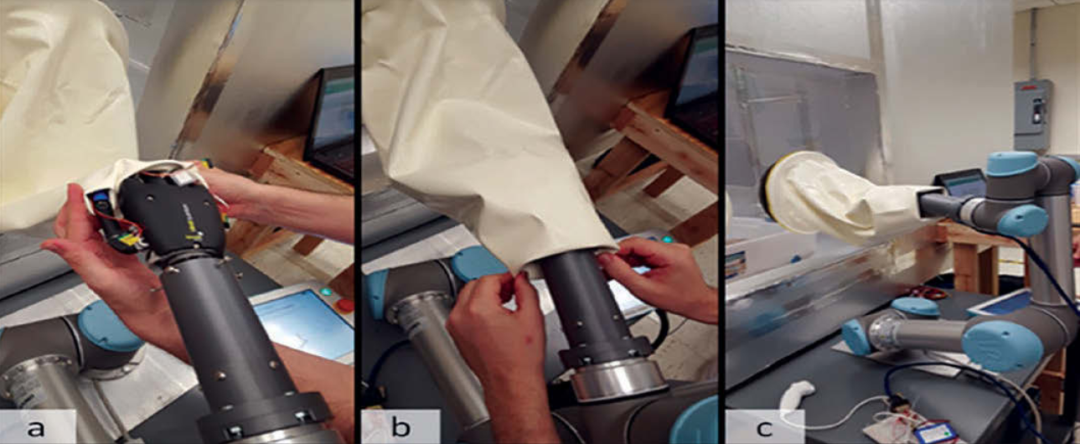
圖7:將手插入手套箱進行測試的步驟:(a)將指尖插入手套的初始手姿勢,(b)將手完全插入手套,以及(c)將手插入到手套箱的手臂。
這是通過將手配置為預先編程的姿勢,并將指尖插入手套來完成的(圖第7a段)。
手臂程序開始將手穿過手套開口,同時用戶將手套進一步滾動到手上(圖7b)。
這種情況一直持續到手完全處于手套箱中運行任務的起始位置(圖7c)。
按照相反的順序,進行同樣的程序,將手從手套箱中取出,運行預先編程的軌跡進行取出。
在人體測試過程中設置的刷磚任務也用于機器人測試。
四塊磚被放置在手套箱中,呈弧形配置,這樣機器人就可以夠到每一塊磚。
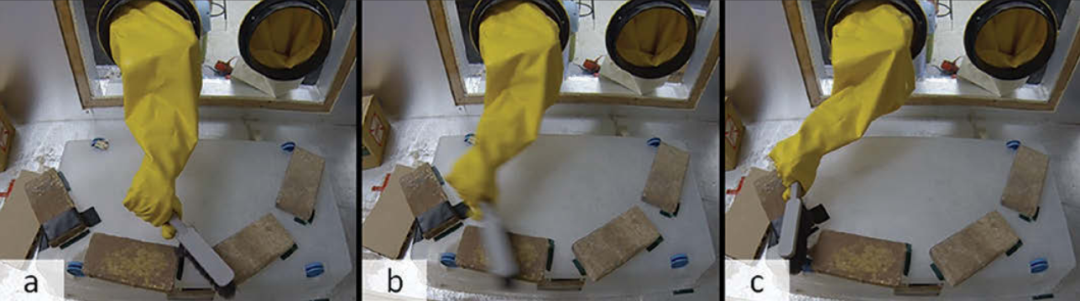
圖8:一次刷磚動作過程圖片
對于該任務,機器人被編程為刷每塊磚10次,然后前進到下一塊磚,如圖8所示。
一直循環到最后一塊磚,并在實驗期間重復進行。
用戶界面允許參與者在整個實驗過程中控制抓握刷子的手,同時手臂根據預先編程的路徑計劃自主移動。
6、輻射測繪
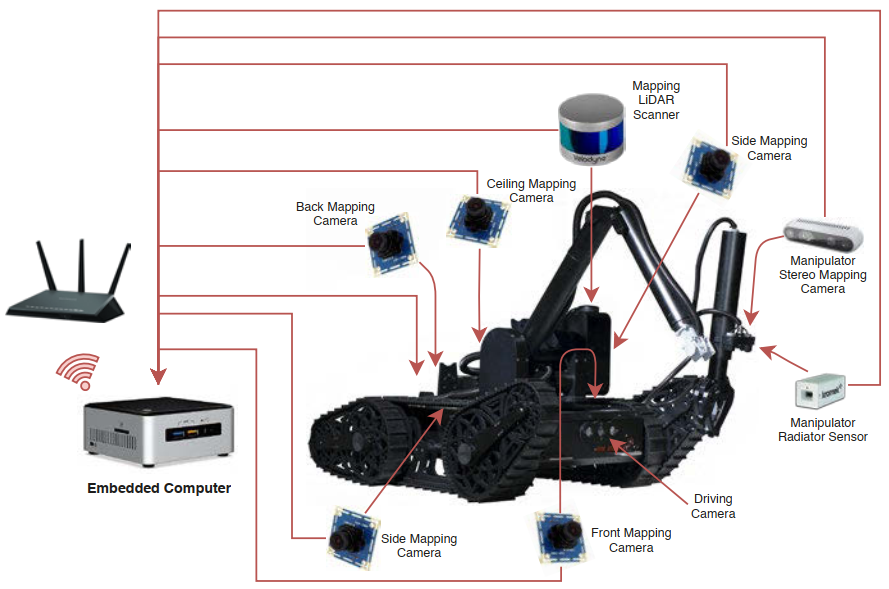
圖9:Jaguar V6履帶式機器人平臺,配有機械臂和儀器。
準確的設施特征信息是成功理解放射性危害、規劃清理工作和實現DOE標準和指南制定的質量保證目標的關鍵因素。
在表征設施時,先進的自主系統是安全、高效、經濟高效的工具,可以安全地部署最先進的儀器,而不會使工人面臨輻射風險。
考慮到許多設施的大尺寸,再加上輻射傳感器的高成本和放射源的性質,移動系統為目前的現場傳感器網絡或現場人員進行的手動測量提供了一種具有成本效益的替代方案。
自主系統還可用于在運行、退役和/或最終狀態評估期間評估設施狀況所需的連續輻射測量。
這項研究的目的是通過提供無損伽馬測量、激光和視覺測繪,以及可能的放射性基礎設施和設施的高光譜成像數據,支持核電站停用和退役活動。
如圖9所示,Jaguar V6履帶式機器人平臺配備了一個機械臂,該機械臂攜帶一個末端執行器,該末端執行器與一個緊湊的高性能伽馬射線光譜儀和一個深度相機相耦合。
平臺上安裝了幾臺攝像機和一臺多通道三維激光雷達,以便于自主導航和繪制地圖。
5-DOF機械臂增加了系統執行輻射傳感和映射的能力,因為傳感器和深度相機可以定位在狹小且難以到達的位置。
FIU團隊一直在測試機器人操作系統社區中提供的幾個最先進的同步定位和映射(SLAM)軟件包。

圖10:FIU應用研究中心機器人實驗室

圖10:同一實驗室,在實施基于實時外觀的映射后
圖10顯示了使用基于實時外觀的映射(RTAB映射)的初步映射結果。
點云——通常由3D掃描儀產生的空間中的一組數據點,
使用3D激光雷達數據和采用視覺SLAM算法的立體相機圖像來生成測量周圍物體外表面上的許多點的圖像。
連續的相機幀被用來跟蹤設定點,并對其三維位置進行三角測量,同時使用這些信息來近似確定相機位置。
對于輻射建模策略,環境中存在的輻射水平,將由位于無人地面飛行器末端執行器的高性能輻射傳感器測量。
傳感器收集的數據將被同化到一個連續的隨機分布模型中,以便能夠在未觀測到的位置進行統計一致的預測,從而估計輻射分布。
該團隊還致力于開發一種自適應采樣策略,以指導機器人的運動。
與建模策略類似,我們正在利用高斯過程回歸對預期輻射分布進行建模,以選擇采樣位置。
回歸是使用以前在類似應用中使用的Matérn核方法完成的。
7、展望未來

EM在過去30年中取得了巨大進步,但在未來幾十年將面臨非常困難的環境修復挑戰,機器人的使用將在EM未來的努力中發揮重要作用。
這里概述的研究工作在研究和教育方面都有很多好處。
除了為新興市場環境修復任務提供工程和研究解決方案外,這些項目還為FIU的STEM學生提供了機會,以提高他們的知識和技能,并有可能為他們未來就業做好準備。
免責聲明:本網轉載自合作媒體、機構或其他網站的信息,登載此文出于傳遞更多信息之目的,并不意味著贊同其觀點或證實其內容的真實性。本網所有信息僅供參考,不做交易和服務的根據。本網內容如有侵權或其它問題請及時告之,本網將及時修改或刪除。凡以任何方式登錄本網站或直接、間接使用本網站資料者,視為自愿接受本網站聲明的約束。